
Прежде чем начать
Прежде чем читать эту статью, рекомендуем вам ознакомится со следующей теорией:
Что такое и зачем нужен велокомпьютер
Велокомпьютер (англ. Cyclocomputer; в просторечии — Велосчётчик) — электронное устройство для измерения скорости и пробега велосипеда, а также дополнительных параметров, таких как средняя скорость, время в пути, максимальная скорость, пульс, передача (на многоскоростных велосипедах), текущее время, температура, давление, каденс (частота вращения педалей) и другие.
Учёт каких параметров может вести велокомпьютер:
скорость и её производные (средняя скорость, максимальная, основная скорость движения и т. д.)
пройденное расстояние
время в пути — активное (то есть когда именно ехали), все время поездки (с учётом перерывов)
пульс — средний, максимальный и т. д.
Потраченные калории за поездку
Частота вращения педалей - оптимальная или нет
Основные компоненты
Основной блок (компьютер) — мозг всей системы
Датчики скорости — в основном крепится на колесо
Датчик каденса — крепится на педали
Датчик пульса — одевается на руку или крепится на теле
Анализ рынка, какой будет наш прибор
Прежде чем делать прибор изучим немного рынок, что продаётся и примерно почём. Все модели можно поделить на 3 категории:
дешевые модели — один проводной датчик, небольшой размер, жк экранчик, работа от батареек около 1года. Функции очень простые — средняя скорость, текущая скорость, часы, пробег. Цена — около 800 руб.
средние модели — два датчика, проводные или беспроводные, жк экран, работа от батареек. Функции — каденс, скорость, средняя скорость, пробег, часы, автоматический старт и стоп. Цена — около 1500 руб.
дорогие модели — наличие bluetooth, два датчика, плюс возможность подключения различных датчиков (сила нажима на педали, пульс, скорость насыщения организма кислородом и другие). Функции — каденс, калории, скорость, пробег, и в зависимости от датчиков — около 5000 руб.
Будем ориентироваться на средний или даже дорогой сегмент по функциям, а по цене не дороже дешёвых моделей — дешевле 700 руб. Так как мы сами будем паять прибор, то будет проще, если мы исключим экран (это прибор для новичков, и начинать сразу работать с дисплеем — это плохое начало) и заменим его на bluetooth модуль. От этого мы только выиграем. Это даст нам возможность не только выводить любую информацию, но и программировать прибор с телефона по bluetooth. Также это сильно снизит габариты прибора. Добавим возможность вести историю поездок, и звуковой контроль каденса — это очень полезная функция, позволяет не перегружать суставы на многоскоростных велосипедах. Также в случае, например, тренировки на скорость — добавим звуковой контроль минимальной скорости. Ну и естественно, так как у нас большой экран смартфона, то будем выводить всю возможную статистику. Средняя скорость - не очень информативный показатель, если мы делаем частые остановки. Гораздо интереснее знать скорость, с которой мы ехали большую часть времени. Обязательно будем считать калории, и только в тот момент, когда мы крутим педали. Часы есть на телефоне, и нам не нужны. А вот возможность автоматически определять поездки и фиксировать по ним информацию — очень.
В итоге, мы должны получить велокомпьютер, который всегда находится на велосипеде, всегда готов к работе. Аккумулятора должно хватать на очень долго. Сели на велосипед и поехали, он сам понял, что началась новая поездка и начал запись. В любой времени остановились (или на ходу) посмотрели параметры текущей поездки, сравнили с прошлыми поездками, задали параметры контроля — и поехали дальше. В случае нарушения контролируемых параметров - он просигналит. Приехали — загрузили на телефон, компьютер, всю информацию для анализа. Такой незаметный, нужный помощник.
И самое главное! Это будет ваш прибор, с программой и функциями, которые вам нужны! Ни в один продаваемый прибор залезть нельзя, этот же вы сделали сами. Ну и конечно, делая этот прибор вы изучите много нового, и станете ещё лучше разбираться в микроэлектронике. Освоите методики их программирования и перейдёте к более сложным приборам. Обязательно внимательно прочитайте эту статью, сделайте прибор и напишите программу сами! Пусть это будет ваша программа, ваш прибор!
{product id=1}
Постановка задачи
Теперь можно составить полный перечень требований к нашему велокомпьютеру. Это обязательно надо делать в самом начале продумывания прибора. Перечислим все основные функции, а также другие важные характеристики прибора в виде таблицы.
Параметр |
Требования |
Питание |
Аккумулятор, зарядка по miniusb, одного заряда должно хватать на 10-20 поездок по 3 часа. |
Измеряемые показатели |
Пройденное расстояние, скорость, потраченные калории, каденс |
Особенности |
Контроль каденса — с помощью звука, экрана у нас нет, так что максимально будем использовать звук. |
Интерфейс |
Bluetooth serial port 2.0 |
Корпус |
Небольшой корпус с удобным креплением к велосипеду |
Подбор компонентов
Для начала необходимо определится с датчиками и местом крепления прибора. Это сильно влияет на корпус. Необходимо составить интерфейс общения, после этого можно определить какой микроконтроллер подойдёт, составить схему, подобрать аккумулятор и микросхему для заряда. И уже в конце корпус прибора. Когда будете сами разрабатывать свой прибор, следуйте такому же порядку мыслей как в этой статье.
Датчики
Для измерения скорости велосипеда и пройденного расстояния можно использовать:
gps модуль — спутники дают данную информацию
инерциальная система позиционирования
счётчик оборотов колеса
Для измерения каденса — нужен счётчик оборотов педалей.
Мы выберем самый простой вариант — счётчик оборотов колеса и педалей. Для подсчёта оборотов удобнее всего использовать магнит закрепленный на колесе и датчик магнитного поля закрепленный на раме и такой же вариант для педалей. Возможные датчики магнитного поля:
Датчик |
Преимущества - недостатки |
Датчик холла |
Миниатюрный, точный, нет физических контактов - нет износа, нет дребезга контактов. Высока чувствительность. Высокая частота срабатывания.
Основной недостаток — энергопотребление от 2ма. Что не годится для спящего режима. |
Геркон |
Относительно небольшой, нет энергопотребления (по сути кнопка).
Невысокая чувствительность, дребезг контактов — ограничение по частоте срабатывания 400гц. |
Чтобы рассчитать подойдёт ли нам геркон, нужно посмотреть не превысили ли мы его максимальную частоту срабатывания на максимальной скорости движения велосипеда. Допустим диаметр колеса у нас 50см, максимальная скорость велосипедиста 100 км\ч. За один оборот колесо проходит, по известной формуле длины окружности:
π D = 3,14 * 50 = 157см = 1,57м.
Чтобы найти частоту срабатывания в секунду надо перевести максимальную скорость в метры в секунду
100 км\ч = 100000м / 3600с = 27,8 м\с.
Частота срабатывания геркона будет равна 27,8м\с / 1,57м = 17,7 оборотов\с = 17,7Гц. Геркон отлично подходит для данного прибора, его частота 400Гц.
Для прибора нам необходимо 2 геркона — один будет учитывать кол-во оборотов колеса — другой педалей. Можно оба датчика сделать выносными на проводе, но так как у нас нет необходимости в экране (интерфейс будет по bluetooth) — то для минимизации проводов — мы разместим прибор на задней вилке. При этом один геркон разместим в корпусе прибора — другой на небольшом удалении с помощью провода. Если вы эстет, то можете использовать черные стяжки. Для того чтобы прибор не скользил по вилке велосипеда, можно использовать специальную подложку сетку под ковры.

Интерфейс общения
Как мы видели ранее, в велокомпьютерах используется экран на который выводится нужная информация. Мы решили использовать bluetooth. Практически у всех сейчас есть смартфон, в котором он есть (к сожалению, iphone не работает с протоколом Bluetooth SPP). Учитывая тот факт, что критическую информацию можно передать звуком (пищалка), а все показатели снять по окончанию поездки или во время остановок — bluetooth отличная замена экрана (вы также можете легко модернизировать прибор на работу с экраном — далее разбираются приборы с ЖК экранами).
Будем использовать Bluetooth Serial Port для передачи данных — соответственно нужен протокол UART. Возьмём модуль Bluetooth SPP-C. Данный модуль обеспечивает двух стороннюю прозрачную связь между телефоном и велокомпьютером. Для отображения информации на экране телефона мы будем использовать простейшую программу bluetooth terminal (вы можете использовать другие более симпатичные программы или написать свою). Информацию будем передавать каждые 2 секунды в виде форматированной строки текста.
Что будем передавать:
Велокомпьютер будет передавать информацию:
Текущая скорость движения в км\ч
Каденс - скорость вращения педалей в об\мин
Макс скорость за поездку
Длительность поездки полная и активная
Основная скорость — та скорость с которой едем большую часть поездки
Время проезда со скоростью в определённом диапазоне— интервалы по 4км\ч до 40км\ч
Что будем получать:
Настройку прибора будем производить с телефона. Можно будет задать следующие параметры:
диаметр колеса для проведения всех расчетов — в см.
вес человека (для расчёта калорий) в кг
настройка контроля каденса — минимальный каденс при котором необходимо подать звуковой сигнал (при езде на велосипеде необходимо так выбирать скоростной режим, чтобы каденс был больше 80 об\мин — вот это и будем отслеживать)
Запрос на получение итоговых данных - подробные за 3 последние поездки и итоговые за все время пользования прибором
Использование пищалки:
при включении
при переходе в спящий режим
при нарушении скорости каденса на 10 об\с в течение 2 мин
Микроконтроллер
Выберем микроконтроллер. Какие требования к микроконтроллеру в нашем проекте?
считывать показания 3 кнопок (наши датчики — герконы и еще одна кнопка)
иметь интерфейс UART для общения с bluetooth модулем
наличие спящего режима для энергосбережения
для более полного погружения в программирование, необходим полноценный отладчик
удобный корпус для пайки
точный подсчёт интервалов времени, работа от кварца
EEPROM память для хранения настроек
Выберем серию STM8. Она имеет отличный отладчик ST-Link по 2-ум проводам, симулятор и всю необходимую периферию. Программа будет небольшая, выберем самый дешёвую модель - наш выбор STM8S003F3P6. Можно выбрать линейку STM8L — но они дороже, а энергопотребление у нас будет минимальное.

Аккумулятор
Для выбора аккумулятора рассчитаем примерный расход энергии. Основные потребители энергии:
Модуль |
Потребление |
Микроконтроллер |
1мА на частоте 1мгц (нам больше не надо) 4мкА в спящем режиме |
Bluetooth модуль |
8мА в режиме активного соединения 30мА в режиме поиска соединения |
Прочая утечка — LDO в режиме отключения и прочие утечки |
3мкА |
Таким образом, максимальный расход энергии — 40мА. Рассчитаем сколько миллиампер будет тратиться на одну поездку длительностью 3ч при следующем профиле работы прибора:
1 поездка 3часа
bluetooth работает за время поездки 2мин поиск, 30мин активное соединение
во время поездки 1ч спим
получается 2ч потребление 1ма, 1ч потребление 7мкА, 30мин потребление 8мА, 2мин потребление 30мА. Если все привести к мА\ч то получается:
2 мА\ч + 0,007мА\ч + 4 мА\ч + 1ма\ч = 7,007 мА\ч.
Надо необходимо, чтобы заряда хватало минимум на 10 поездок. Значит нужен аккумулятор ёмкостью более 70 мА\ч. Будем использовать Li-ion аккумулятор LIR-2450 ёмкостью 120мА\ч.

Рассчитаем расход в спящем режиме. Расход 7 мкА\ч. Значит прибор может проработать на оставшихся 50 мА\ч около 7143 часов = 300 дней.
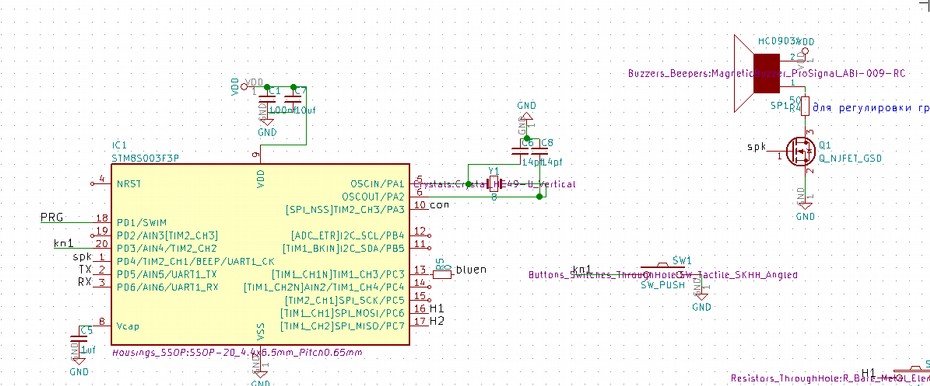
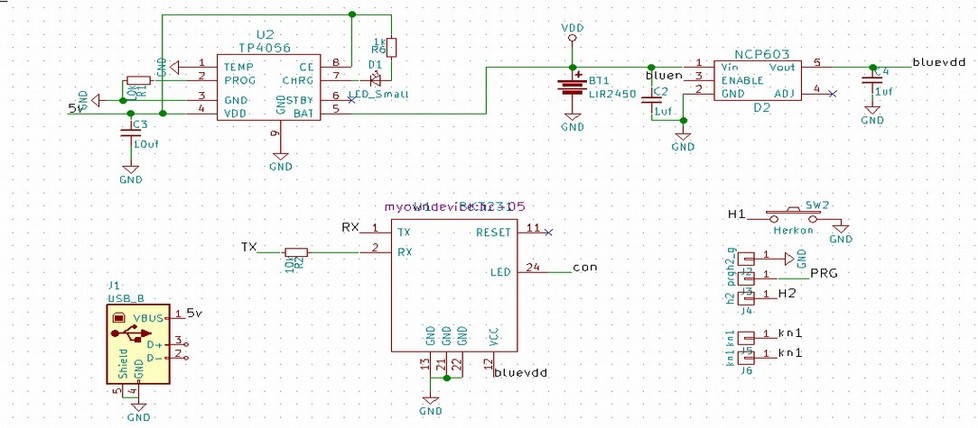
Составляем схему
Начнём с питания. Аккумулятор мы выбрали. Соответственно нужна схема его заряда. Заряжать наш прибор будем через разъем micro-usb, микросхему для заряда возьмём самую дешёвую — TP4056. Ток заряда установим 100 мА (примерно 1C для выбранного аккумулятора).
Bluetooth модуль — самый простой UART slave модуль на базе BK3231

По datasheet на модуль ему необходимо питание от 2 до 3.6в. У нас аккумулятор выдаёт от 3 до 4.2В. Соответственно нужен LDO для понижения напряжения до 3.3В. Возьмём серию NCP603 на 3.3в.

Микроконтроллер мы выбрали — STM8S003F3 — его питание от 3 до 5В. Ему LDO не нужен. Таким образом, МК будет питаться сразу от аккумулятора, LDO будет питать bluetooth модуль, включать LDO будем только на время работы модуля.
Герконы — подключаем стандартно, как кнопки, сразу на вывод и на GND. Будет использовать встроенный в МК PULL-UP резистор. Точно также подключим тактовую кнопку.
UART — так как у нас разное напряжение питание модулей то нужно согласование напряжения. Разница между уровнями 4.2В — 3.6В = 0.6В. Проблема будет только в канале TX, когда передаём сигнал с МК на модуль. Так как в модуле стоят защитные диоды на всех входах, то достаточно использовать простой резистор на 10 кОм.
Пищалка. Возьмём очень громкую пищалку — HC0903A, на 3В — но будет работать и на 4В. Ток работы — 100ма.

Соответственно нужен будет транзистор для управления пищалкой. Возьмём маломощный N-Mosfet 2N7002 (до 300ма ток), так можно сэкономить на резисторе на базе транзистора.
Для МК нужна стандартная обвязка плюс кварцевый резонатор на 8МГц.
Схема определена. Теперь нарисуем ее в Kicad.
И
вторая часть
Размещение велокомпьютера, Корпус и плата
Подберём корпус для нашего прибора. Для этого прикинем размер платы. Размещение будет такое — сверху на плате — МК, micro-usb, микросхемы заряда и все прочее, снизу — кварц и bluetooth модуль. На краю платы угловая тактовая кнопка:

Получаются
примерные размеры 50х30 мм. Мне понравился
корпус фирмы GAINTA — NUB503522BK:

Внутренние
размеры платы под корпус — 45х30мм, что
вполне подходит. Корпус имеет 2 крепёжных
отверстия для платы, что очень удобно,
а также ушки — за них можно крепить к
велосипеду. Так как у нас нет экрана и
смотреть нам не надо, то удобнее разместить
велокомпьютер на задней вилке велосипеда.
При таком размещении один геркон можно
разместить прямо на плате, а второй на
коротком проводе — педали рядом. Кнопка
должна быть на противоположном боку от
геркона. Второй геркон можно просто
припаять внутри прибора или использовать
любой разъем в разрыв провода.
Платы
мы уже научились разводить на приборах
ST-Link и UART, так что готовая плата находится
на github проекта
папке Kicad.
Математика
Прежде чем переходить к программированию, разберём как мы будет вычислять нужные нам параметры. Немного совсем простой математики.
Первое, что нам надо уметь - это переводить количество оборотов колеса в пройденное расстояние. Тут будем использовать всем известную формулу длины окружности.
C (длина окружности) = π (константа ПИ = 3,1415926535) * D (диаметр колеса).
Далее нам необходимо переводить единицы времени — миллисекунды в часы. Ну тут просто используем тот факт, что в одной минуте 60 секунд, а в одном часе 60 минут.
Для расчёта потраченных калорий будем использовать простую формулу
(Калории в ккал) = (Скорость в км\ч) * (Время в ч) * (Вес в кг).
Считать калории мы будем только тогда, когда крутим педали.
Вместо средней скорости мы будем считать основную скорость — ту скорость, с которой мы едем наибольшее время во время поездки, с точностью до 4 км\ч.
Также мы будем считать, что диапазон скоростей у нас от 0 до 60 км\ч, конечно велосипед может развивать большую скорость, но только если он в руках спортсмена.
Программа
Программа написана в среде ST Visual develop IDE. Полный проект вы можете скачать с github данного прибора, папка velo. В статье мы разберём ключевые моменты работы программы.
Структура файлов проекта
Проект создан на основе библиотеки SPL для STM8 от ST. Подробное описание как развернуть проект вы найдёте в этой статье. Основная программа содержится в файле main.c, работа с прерываниями в файле stm8s_it.c, частота кварца задана в файле stm8s.h. Остальные файлы остались без изменений.
Общее описание программы
Упрощённый алгоритм работы программы.
При включении производится настройка всей периферии, внешнего кварца и система переходит в спящий режим
После нажатия кнопки или срабатывания прерывания от датчиков, система стартует, о чем оповещает звуковым сигналом
Из EEPROM считываются записанные настройки, если они равны 0, то туда записываются типовые настройки, обнуляются все данные о поездках, идет подготовка EEPROM
Фиксируется начало поездки, обнуляются все переменные по поездке
Включается bluetooth модуль для экономии энергии на 2мин, включение и выключение модуля фиксируется звуковым сигналом
Через прерывания фиксируются показания датчиков и рассчитываются все необходимые параметры
Каждые 2с на bluetooth передаётся текущая информация о поездке, если он включён
Если в течение 2мин не было прерываний от датчиков, то МК переходит в спящий режим, выход по прерыванию от датчиков или кнопки
Кнопка включает\выключает bluetooth модуль, а также будит МК
Если МК находится в спящем режиме больше 2часов, то считается, что поездка завершилась. Идёт анализ данных поездки, если расстояние меньше 500метров, то данные по поездке обнуляются и не сохраняются, иначе данные о поездке сохраняются в EEPROM
При получении данных от bluetooth модуля, идёт их анализ и разбор фраз настройки МК, данные записываются в EEPROM
Во время активного режима работы МК идёт анализ скорости и каденса и в случае превышения заданных параметров идёт оповещение звуковым сигналом
Инициализация, прерывания
Рассмотрим более подробно исходный текст программы. Основная программа находится в функции main(). Первым делом необходимо произвести все настройки периферии.
Данный регистр отвечает за использование необходимой периферии, каждая периферия потребляет энергию, если она включена, даже если мы ей не пользуемся. Для экономии энергии отключим все, кроме UART(используется для обмена с bluetooth модулем) и TIM4 (таймер 4 используется как миллисекундный таймер).
Задаём работу от внешнего кварца. Кварц у нас в проекте — 8Мгц, делитель CPU устанавливаем на 8, чтобы МК работал на частоте 1Мгц для экономии энергии. В STM8 все настройки частоты производятся прямо в коде программе, необходимости в прошивке фьзов, как например, в AVR, нет. Это очень удобно. Автоматический (CLK_SWITCHMODE_AUTO) режим переключения кварца означает, что система сама дождётся корректного запуска внешнего кварца и потом перейдёт на него.
Настройка работы выводов МК датчиков и кнопки. Используется режим PULL UP и включаются внешние прерывания на этих выводах (GPIO_MODE_IN_PU_IT). Принцип срабатывания внешних прерываний на выводах задается в целом для порта. EXTI_SENSITIVITY_FALL_ONLY — означает прерывание по падающего сигналу, когда на выводе сигнал меняется с HIGH на LOW, для нас это будет соответствовать нажатию кнопки или срабатыванию геркона.
Настраиваем UART для связи с bluetooth модулем. Вся работа будет вестись на прерываниях. Здесь задаем скорость порта — 9600, работу TX и RX, контроль четности, асинхронный режим, передачу данных по 8 бит. То есть так, как этого требует bluetooth модуль. Последней командой включаем работу прерываний по UART событиям.
Запускаем миллисекундный таймер. Обратите внимание, что частота кварца 8Мгц, не смотря на установленный делитель для CPU, вся периферия работает на 8Мгц, в том числе и все таймеры. Поэтому устанавливаем предделитель 64, а счетчик — 125 (8 000 000/64/125 = 1000 = 1мс). Включаем прерывания на таймере 4 и запускаем работу прерываний. После этого включаем сам таймер 4.
Настраиваем работу выводов как LOW, для энергосбережения. Если их оставить в неопределённом состоянии, триггеры Шмита на входах будут тратить энергию. Ножки 4,5 порта B не имеют триггеров Шмита, оставим их в неопределённом режиме. Динамик выключаем. Bluetooth модуль выключаем.
Переводим МК в спящий режим по команде halt(). Это сделано для того, чтобы в случае разряда аккумулятора при включении зарядного устройства не было попыток проиграть музыку, это требует много энергии, а зарядное устройство на столько не рассчитано, аккумулятор еще слабый и это вызывает перегрузку МК, мешая заряду аккумулятора.
После выхода из спящего режима по прерыванию, программа продолжает выполнение после инструкции halt().
Проигрываем музыку, включаем bluetooth на 2 минуты. Запускаем счетчик перехода в спящий режим.
На этом настройка выполнена, программа переходит в основной цикл.
Миллисекундный таймер, события по временным интервалам
Обработка всех временных событий ведётся в прерывании таймера 4. Сам обработчик прерывания проще перенести в файл main.c, потому что, в нем будет много общих переменных. Предопределённая процедура INTERRUPT_HANDLER(TIM4_UPD_OVF_IRQHandler, 23). Разберём обработку этого прерывания. Данное прерывание срабатывает каждую миллисекунду, согласно настройкам таймера 4.
Первым делом при входе в прерывание оповещаем МК, что мы его обработали. Без этой команды вызов прерывания будет продолжаться бесконечно и МК зависнет. Далее идёт обработка событий по времени. Для того чтобы посчитать прошедшее время используется очень простая методика. Если нам необходимо выполнить какое действие по прошествую времени Х мс, то заводим глобальную переменную timeX, и в момент начала события записываем в эту переменную нужное количество миллисекунд. В обработке прерывания таймера необходимо написать следующий код:
Уменьшаем на 1 значение переменной пока там не станет 0. В глобальном цикле, в основной программе далее проверяем данную переменную на 0 и когда она станет равной 0 выполняем нужное действие. Например, так мы выключаем bluetooth через 2 минуты.
Дополнительно для удобства вводим секундные события
Если же нам необходимо посчитать какое-то время от прошедшего события, то используем увеличение на 1 переменной каждую мс. Например, для расчета времени одного оборота колеса используется такой код
Программа внутри прерываний должна быть максимально лёгкой. Все тяжёлые вычисления должны выполнятся в основном цикле. Поэтому, обычно, внутри прерываний устанавливаются различные флажки, записываются значения в переменные, а вся обработка делается потом, в основном цикле.
Работы пищалки, звуковое оповещение
Для звукового оповещения мы используем мини пищалку. Для воспроизведения звука необходимо подать меняющийся сигнал 0 — 1 с нужной частотой. Наша пищалка имеет самую большую громкость в районе частоты 3Кгц. Но в принципе будет пищать с любой частотой. Для создания на выводе МК меняющего сигнала можно использовать таймер. Например, для частоты 3Кгц нам необходимо иметь таймер срабатывающий 6тыс раз в сек. И каждое срабатывание менять состояние вывода МК. STM8 специальную периферию для работы пищалок. Ей мы и воспользуемся. Звук может выводится только на вывод №1 и с частотой только 1, 2 или 4 Кгц. Нам этого хватит, чтобы издавать различные несложные мелодии. В стандартной библиотеке в примерах есть специальная функция, которая может калибровать данный генератор звука по кварцу, но можно ей не пользоваться.
Так как звук у нас будет запускаться в основном цикле, то можно использовать функцию Delay для формирования паузы. Сделаем специальную функцию, в которой и будет проигрывать различные мелодии:
Все очень просто. Задаем нужную частоту и запускаем генератор. Через определённую в миллисекундах задержку выключаем, включаем опять с другой частотой и т. д. Получается простая мелодия — два писка, три писка разной тональности. Нам этого вполне достаточно.
Обработка кнопок и датчиков, дребезг контактов
Обработку кнопок будет делать с помощью прерываний. В начале программы мы уже инициализировали работу прерываний. Срабатывать они будут только по нисходящему фронту — то есть когда мы нажимаем кнопку (так как кнопки у нас подтянуты через PULL-UP, то там всегда HIGH, когда нажимаем — получается LOW). В момент срабатывания кнопки для устранения дребезга контакта мы отключаем работу прерываний на нужное количество миллисекунд.
Так как обработчик прерывания у нас один на весь порт, то необходимо проверить наш ли вывод его вызвал. Для этого считываем состояние нужного нам вывода и есть там LOW, то кнопка нажата. Далее мы отключаем прерывание на выводе D3 и устанавливаем флажок kn в TRUE, для обработки события в основном цикле. Тут же запускаем таймер защиты от дребезга контакта. Заметим, что отключать прерывание мы будем только тогда, когда переменная haltstart у нас равна 0. Это нам необходимо для того, чтобы случайно не выключить прерывания прямо перед уходом в спящий режим, а то мы не сможем разбудить наш МК.
По прошествию этого времени, включаем прерывание обратно в обработчике прерываний таймера 4.
Каждую миллисекунду уменьшаем значение счётчика и когда дошли до 0, то включаем прерывания обратно. Аналогично обрабатываем срабатывания датчиков холла. Но там нам необходимо считать время, прошедшее с последнего срабатывания датчика, поэтому таймер там будет увеличивающимся с 1, значение 0 оставим специально для признака того, что предыдущего срабатывания не было.
В обработчике таймера делаем аналогично, но h1time растет, а не уменьшается
Дополнительно в той же процедуре обнуляем скорость и показания h1time в случае превышения 3сек
Вычисления, расчёт показателей
Основой всех вычислений у нас является показатель скорости вращения педалей и скорости велосипеда. Переменные scor1 и scor2. Для расчёта скорости вращения педалей в обработчике прерывания, при обработке соответствующего датчика, вычисляем scor1 по формуле
Так как время h1time, прошедшее с последнего срабатывания датчика у нас измеряется в миллисекундах, то необходимо 60сек перевести в миллисекунды и поделить на время одного оборота. Это будет мгновенная скорость вращения педалей.
Для расчета скорости велосипеда используется формула длины окружности
Так как мы работаем с целыми числами, то необходимо использовать большие форматы uint32_t, для помещения результата всех умножений перед делением, а потом поделить. В целочисленной математике порядок операций имеет очень большое значение. Например, 2*100/4 = 50, а вот 2/4*100 = 0. Изначально полная формула у нас такая:
 =
=

таким образом получается наша формула. Можно использовать большую точность числа PI, но в общем принцип понятен. Дополнительно в массиве hall[] мы считаем количество оборотов педалей и оборотов колеса.
Дополнительно раз в секунду мы считаем скорость велосипеда по границам 0-4км\ч, 4-8км\ч и т.д. В отдельном массиве obs[] мы получаем количество секунд, которое мы ехали с определёнными интервалами скорости, а также общее количество секунд, которое мы ехали - activetime. Конечно это не совсем хорошо, ведь скорость может меняться чаще чем раз в секунду. Но велосипед очень инертен, мы не можем очень быстро тормозить и разгоняться, так что этим можно пренебречь. Делаем это в обработчике таймера 4.
Также раз в секунду мы будем считать потраченные калории. Так как нам нужна тут большая точность, то будем использовать тип float. Формула была описана выше.
Расстояние, которое мы проехали, считаем уже в основном цикле исходя из массива hall[] , при форматировании конечного результата. Её мы передаём на bluetooth, если он включён каждые 2сек. См раздел по работе с bluetooth.
Работа с EEPROM, хранение значений в энергонезависимой памяти
STM8 позволяет работать с EEPROM в нескольких режимах. Первый — автоматическая перезапись — вы записываете новое значение во флеш, старое автоматически стирается. Второй — вы сначала стираете ячейку, а потом записываете новое значение. Во втором случае, скорость записи выше, а обнулить значения можно заранее. Когда работаете с EEPROM необходимо внимательно читать Datasheet, у каждого МК своя методика, а также свой минимальный размер записываемой информации. В STM8 минимальный объем это 1 байт, например, в STM32 — это страница — 256 байт. Объем EEPROM очень небольшой, поэтому надо экономить этот вид памяти — у нас всего 128 байт.
Для упрощения работы с EEPROM в СИ удобно использовать структуры, которые будут описывать записываемые параметры. Компилятор размещает структуру в оперативной памяти последовательно, как она заявлена в СИ. Таким образом, чтобы записать или прочитать структуру в EEPROM, достаточно записать\прочитать нужное количество байт, начиная с адреса структуры. Напишем вспомогательные функции для чтения и записи во флеш из оперативной памяти.
Перед началом работы с EEPROM, необходимо разблокировать для записи данный вид памяти, если этого не сделать, то данные записать не получится. Это специальная защита от случайной перезаписи памяти. Далее мы используем функции из библиотеки для записи и чтения одного байта. Теперь, например, чтобы записать во флеш структуру данных, необходимо так вызвать нашу функцию:
Записать во флеш 14 байт, начиная с адреса 0x4000h, данные из памяти по адресу структуры param.
Мы будем хранить во флеш памяти настройки нашего прибора — структуру param, а также данные о четырёх последних поездках. Структуры выглядят так.
Мы храним вес, диаметр колеса, общий пробег, общие потраченные калории, номер поездки для записи во флеш, настройки контроля. А по каждой поездке — номер поездки по порядку, чтобы видеть сколько вообще раз ездили, пробег за поездку, калории, активное время в секундах, проценты времени (для экономии места в памяти 100% занимает 1 байт) с определённым диапазоном скорости от активного времени.
При включении МК мы проверяем, что у нас есть заданные параметры и считываем их оперативную память, если их нет, то записываем стандартные настройки.
Для хранения последних поездок мы организуем во флеше кольцевой буфер данных поездок. Данные пишутся в память следующим образом — 1 2 3 4 1 2 3 4, это самый удобный формат хранения данных во флеше, для минимизации циклов перезаписи флеша. Мы помним, что количество этих циклов ограничено.
С данными о поездках мы работаем следующим образом, если МК переходит в спящий режим, то мы записываем во флеш текущие данные о поездке, признак fix в таких данных выставляем в 1. Это гарантирует нам, что если вдруг сядет аккумулятор или произойдёт какое-то ЧП, то данные о поездке останутся в памяти и при следующем включении они зафиксируются в памяти. В случае выхода из спящего режима до окончания поездке, мы продолжаем накапливать данные, если же поездка закончилась, то сдвигаем номер поездки на следующий. Как мы будем определять поездки - разберём в следующем разделе.
Спящий режим, фиксирование одной поездки
Для экономии энергии мы активно используем спящий режим. Если в течение двух минут не было данных с датчиков, то мы переводим МК в спящий режим. В других программах вы увидите, что МК может работать, практически все время проводя в спящем режиме, просыпаясь на несколько миллисекунд. Но тут мы не будем усложнять программу.
STM8 имеет несколько режимов сна, они подробно описаны, в datasheet и отличаются скоростью выхода из спящего режима и энергопотреблением. Мы будем использовать два режима: halt, active halt. В первом режиме МК полностью спит, выход из режима только по внешнему прерыванию. Во втором режиме работает специальный таймер, который будет будить МК, а также внешние прерывания.
Алгоритм работы у нас такой с поездками такой:
после двух минут бездействия, переводим МК в activehalt, интервал пробуждения 30 секунд
если нас разбудили внешние прерывания, значит поездка продолжилась, работаем дальше, у нас та же поездка
если внешних прерываний нет, то каждые 30 секунд мы просыпаемся и считаем пока не пройдёт 3 часа
если в течение 3 часов нас никто не разбудил, то поездка закончилась, и велосипед стоит в гараже.
Для экономии энергии перед переходом в спящий режим мы переключаем МК на работу от внутреннего генератора LSI 128 кГц и включаем AWU (auto wake up — пробуждающий) таймер на 30 секунд.
Устанавливаем флажок haltstart, чтобы случайно перед сном не отключить прерывания, при работе с дребезгом контактов. Выключаем bluetooth. Если поездка длилась более 1200 секунд, то запишем данные во флеш, маленькие поездки не фиксируем. Проиграем музыку. На всякий случай включим прерывания. Мы готовы ко сну. Теперь переходим на LSI генератор.
И активируем AWU таймер, специальная переменная isawu будет говорить нам, что мы проснулись от AWU, в этом случае будем опять засыпать. Разберём обработчик прерывания AWU.
Сначала сбросим флаг, чтобы оповестить МК, что мы обработали прерывание, не забываем это делать. В обработчике прерывания AWU таймера проверим закончилась поездка или нет. Если нет, то спим дальше — признак isawu стоит. Если поездка закончилась, то фиксируем ее в памяти, fix = 2, и начинаем следующую пустую поездку, обнуляем все данные, отключаем AWU таймер и спим дальше.
При включении МК проверим не было ли сбоя, в тек поездке стоит признак fix=1, в этом случае зафиксируем поездку и начнём следующую.
Работа с bluetooth - получение данных
По bluetooth мы можем получать различные команды, для управления нашим прибором. Для их обработки создаем специальный массив Rxbuff[], в нем будет хранится строка для обработки. Также будет необходим специальный флажок — Rxready, который мы будем выставлять, когда строка получена. Заполнение буфера реализовано в прерывании в файле stm8s_it.c, а обработка буфера в основном цикле, чтобы не загружать прерывания.
Прерывание срабатывает в тот момент, когда периферия получила один байт информации. Проверяем, что байт получен и считываем его в переменную «c». В момент считывания байта происходит автоматическое снятие флага сработавшего прерывания, так что выставлять какой-то флажок, чтобы сбросить прерывание, нам нет необходимости. Далее мы предполагаем, что любая команда состоит из 4 байт и заканчивается символом перевод строки. Если мы еще не успели обработать буфер, то новые данные не получаем. Если получили конец строки, то выставим RXready в истину. Если буфер заполнен весь, то будем считать, что строку получили, иначе запишем очередной байт в буфер. На этом работа с прерываниями закончена. Теперь в основном цикле осталось разобрать строку.
Прежде чем посмотреть, как мы будем разбирать строку, опишем возможные команды, которые будет понимать наш прибор. Вот наши команды:
clr — обнулить все данные в памяти, полный сброс. Чтобы случай не стереть все, запросим подтверждение этой команды.
yes — подтверждение команды clr
v256 — установка веса в кг, например, для веса 65 кг, команда будет такой — «v65\n», далее аналогично
d256 — установка диаметра колеса в см
s127 — установка контроля скорости, не меньше заданной, 0 — нет контроля
s-127 — установка контроля скорости не больше заданной, 0 — нет контроля
k127 — установка контроля каденса, не меньше заданной, 0 — нет контроля
k-127 — установка контроля каденса, не больше заданной , 0 — нет контроля
info — вывод информации о предыдущих поездках из памяти.
Сам модуль в этой части большой. Подробно описывать его не будем. Вы можете посмотреть исходный код самостоятельно. Приведем лишь общий смысл.
Процедура начинается тогда, когда флаг RXready выставлен. Flagclr — используется для подтверждения получения предыдущей команды «clr», и если все подтверждено, введена команда «yes», то очищаем данные о поездках во флеш. После получения «clr» выведем, что мы ждем подтверждения.
Далее по первой букве команды мы определяем, что необходимо выполнить. Если это команда по установке параметров, то далее переводим текст в число, а заодно проверяем что это именно число. По окончанию установки параметра, записываем данные о параметрах во флеш и выводим их по bluetooth, чтобы подтвердить факт установки параметров.
В самом конце снимаем признак RXready и готовимся принять следующую команду.
Работа с bluetooth - вывод данных
Для передачи данных по bluetooth мы будем использовать стандартную функцию printf. Стандартная библиотека проекта на STM8 (на других МК это работает похожим образом) позволяет настроить вывод данную функции на любую периферию. Для этого созданы специальные макросы PUTCHAR_PROTOTYPE и GETCHAR_PROTOTYPE, в которых необходимо написать, как МК будет передавать или получать один байт с периферии. Для получения данных мы самостоятельно обрабатывали прерывания, а вот для вывода данных, воспользуемся этим механизмом.
Так выглядит функция передачи одного байта по UART. Записываем байт в специальный регистры данных UART и ждем окончания передачи — флаг TXE сброшен.
После такой доработки пользуемся стандартной функцией форматированного вывода printf и получаем на смартфоне переданный текст. Для снижения нагрузки на МК, передавать данные мы будем 1 раз в 2 секунды, сама передача данных идет в основном цикле. Вот так выглядит наш код.
Если bluetooth включен, и время 2 секунды вышло, то запускаем заново таймер и передаем данные. Сначала передаем одной строкой основные параметры — скорость, каденс, общее расстояние и т. д. Потом в цикле передаем данные по интервалам скорости. В данной функции важно использовать приведение типов, то есть если используется форматный символ %li — long — то при передаче параметра, необходимо его привести к типу long. Вот так просто осуществляется вывод информации.
Контроль скорости и каденса
Скорость мы будем контролировать следующим образом. В течение 30 секунд мы будем проверять каждую секунду нарушение режима. Если оно было 80%, то выставляем флаг нарушения. Для этого воспользуемся функцию СИ по сдвигу битов в переменной. Каждый бит кодировать было нарушение или нет. 32 битного числа достаточно, чтобы вести историю за 30 секунд.
Если задан контроль скорости, то для случая положительного параметра, нарушением является скорость меньшая чем параметр, для отрицательного, нарушением является большая чем параметр скорость. Если есть нарушение, то добавляем один к переменной errspeed, в итоге в ней имеем сколько было нарушений за последние 32 секунды. Далее уменьшаем на один количество нарушений, если 31 секунду назад оно было, сдвигаем влево весь результат и правый бит устанавливаем в один, если было нарушение. Так мы в итоге реализуем скользящее окно в 32 секунды. Тоже самое для каденса. Далее в основном цикле остаётся только следить за errspeed, и когда значение больше 20, то пищать нужную мелодию каждые 30 секунд.
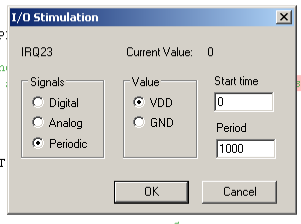
Работа с симулятором
На данном проекте вы можете испытать в работе симулятор. Для работы с симулятором вам необходимо в модуле main.с раскомментировать строку
В итоге будут отключены вызовы функций, не работающие в симуляторе. Для начала работы в симуляторе запускаем отладчик, предварительно установив средства отладки — симулятор. В симуляторе не работают таймеры, прерывания, но их тоже можно симулировать. Делается через специальное окно — View — I\O Simulation. В данном окне можно симулировать любое прерывание по номеру, номер можно найти в функции обработчике прерывания. Например, для таймера TIM4 — это 23. Также для симуляции прерывания можно задать периодическое событие, делается это по двойному нажатию на поле «Current Value». В окне необходимо задать нужную периодичность в тактах МК.
Для
ручного генерирования прерывания
необходимо задать новое значение,
отличающееся от старого. Таким образом,
конечно нельзя полностью протестировать
работу программы, но зато можно отладить
сложные алгоритмы в вашей программе.
Как изготовить велокомпьютер
Делаем плату и все запаиваем
Подготовить или приобрести необходимые инструменты: все для пайки, ST-LINK (будет нужен для программирования и отладки МК)
Внимательно прочитать статьи из раздела Обязательная теория.
Скачать необходимые файлы по данному прибору с github.
Изготовить плату для прибора самостоятельно (это совсем несложно, в нашей инструкции все подробно описано). Отметим, что для упрощения построения платы, вывод подключения кнопки необходимо подключить перемычкой из провода — площадки kn1. Kicad показывает это как не подключённую сеть — это не является ошибкой.
Приобрести все необходимые комплектующие.
Запаять все компоненты на плату, смотри наше видео.
Плата готова!
Для программирования лучше припаять (на специальную площадку PRG) провод с разъемом пин терминал, запаянный в термоусадочную трубку — получится удобный разъем для программирования. Программировать удобнее сразу подключив прибор через USB разъем и ST LINK в другой USB разъем, тогда достаточно только подключить SWIM в разъему программирования.
Установка в корпус
Для установки в корпус вам понадобятся 2 небольших шурупа, чтобы прикрутить плату (в комплекте они не идут). Также для исключения вибраций будет необходим кусочек поролона или другой уплотнитель. Необходимо сделать бутерброд — нижняя часть корпуса - плата — поролон — аккумулятор — верхняя часть корпуса. Под провод для датчика необходимо просверлить отверстие в корпусе. Под usb разъем вырезать паз ножом и доработать надфилем. Под кнопку необходимо просверлить отверстие. Кнопка занимает чуть больше места, чем высота стоек в корпусе, поэтому лучше подложить шайбочки под плату до получения нужной высоты. Шайбы можно сделать из оставшегося текстолита или ненужных пластиковых карточек. Если у вас есть желание, кнопку можно разместить сверху платы, но так она будет мешать аккумулятору. Под провод для подключения аккумулятора можно сделать пропил в плате.
Делаем датчик
Один геркон будет распаян на плате, а второй будет припаян на коротком проводе, и будет вне прибора. Геркон, который будет у нас на плате лучше залить каплей термоклея, также разместить его лучше на расстоянии не менее 5 мм от платы, снизу находится динамик, и он может влиять на геркон. Геркон надо разместить как можно ближе к боковой стенке корпуса.
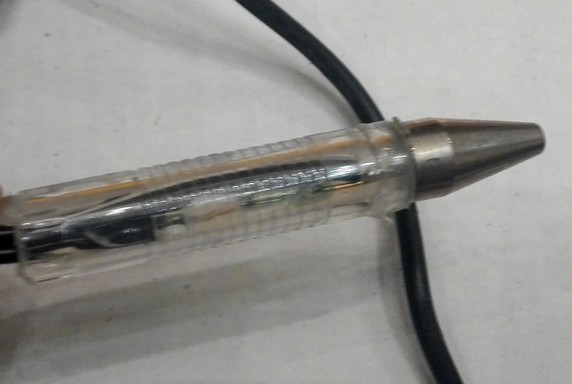
Для того, чтобы сделать датчик на проводе, лучше всего воспользоваться термоклеевым пистолетом. Берём ненужную прозрачную пластиковую ручку, отрезаем носик, припаиваем к проводу датчик, откусываем лишние ножки. (ВНИМАНИЕ! Когда будете паять герконы не гните его ножки, лучше припаять провод параллельно ножкам и их просто откусить. Гнуть их строго придерживая пинцетом, иначе можно разбить стеклянную колбу и сломать геркон.!). Далее вставляем геркон и часть провода в ручку и заливаем под давлением термоклей, так чтобы он заполнил все внутренности. Это сделать наш датчик влагостойким и защитит от повреждений. В принципе вы можете сделать оба датчика на проводах, такая конструкция проще.
Для работы датчика необходим сильный магнит. Можно купить магнит для велокомпьютера (100-200руб), а можно взять магнит из детского магнитного конструктора Geomag. Там очень сильные магниты и их можно прикрепить к спице велосипеда обычной стяжкой. Также бывают очень сильные магниты шайбы. Магнит надо подобрать так, чтобы датчик срабатывал на расстоянии 3-5 см, и проверить при вращении колеса и педалей.
Переходим к программированию
Данный прибор достаточно простой в программировании. В этой статье подробно разобрана вся программа. Мы настоятельно рекомендуем написать программу САМОСТОЯТЕЛЬНО. Пройти полный путь от скачивания библиотеки с сайта ST, до финальной программы. Только так вы сможете изучить программирование микронтроллеров. Если вы не можете справиться самостоятельно, или хотите просто сделать прибор и просто пользоваться им, на github есть все исходные текст. Обязательно поработайте с симулятором и отладчиком. Выполните задания для развития. И самое главное не сдавайтесь. В начале будет тяжело, но интересно!
Написанная программа с нуля, с разворачивания проекта, настроек всех необходимых параметров, будет более полезна, чем просто процедура прошивки МК готовой программой. Ошибки, которые вы найдёте с помощью отладчика и исправите сами — это самое ценное в этом проекте. А готовый прибор будет долго радовать вас на велопрогулках.
Вариант с индикатором
Данный велокомпьютер можно дополнить индикатором. Плату и описание как его подключить можно скачать в этой статье.
На индикаторе можно отображать скорость - шкала из 8-ми красных светодиодов, каденс - вторая шкала из 8-ми зеленых светодиодов, 4 информационных светодиода - отображение статуса bluetooth (синий светодиод), отображение нарушение контроля скорости и каденса (красные светодиоды).
На плате специально выделены площадки для подключения провода управления - J7 или J8.
Для работы с индикатором, необходимо будет из второго геркона тоже сделать выносной датчик. Оба геркона вынести на проводах. Расположить сам велокомпьютер на руле. Один датчик расположить на переднем колесе, а второй протянуть к педалям.
Под светодиоды надо будет в крышке корпуса просверлить отверстия. Припаять питание индикатора необходимо к свободному выводу микроконтроллера, чтобы в спящем режим его можно было отключать.
Программу надо будет самостоятельно изменить для отображения на индикаторе скорости и других показателей. Удобно, например отображать на второй шкале, процент пройденного расстояния от заданного.
Приобретённые навыки
Пайка: пайка модулей, пайка корпуса TTSOP, пайка корпуса SOT-23-5, пайка micro USB разъема.
Схемотехника: LDO, схема зарядки Liion аккумулятора, подключение модуля bluetooth, типовая схема подключения STM8, подключение пищалки, работа с кнопками.
Программирование: обработка кнопок по прерываниям, миллисекундный таймер, спящий режим, AWU таймер, работа с EEPROM, UART
Самостоятельная работа
Вы дополнительно можете доработать функции велокомпьютера. Идеи для доработки:
Дописать функцию контроля скорости, аналогично контролю каденса.
Реализовать различные режимы передачи информации — при движении — передавать только скорость, при остановке передавать итоговые параметры.
Реализовать контроль расхода калорий — устанавливать цель и пищать при её достижении на половину, и по окончательному достижению цели
Расширьте диапазон хранимых скоростей до 120км\ч.
Оповещать звуком каждый км.
Сделайте хранение скорости не по интервалам, а в абсолютном значении, 4 скорости, с которыми вы ехали наибольшее время.